RESEARCH
ヒューマノイド・サイエンス
─ヒト知能の新たな理解を求めて
人工物によるヒト理解
生活を便利にし、我々の活動の場を広げてきた数々の人工物を生み出したヒトの知の偉大さには、今更ながら圧倒される一方、人工物であれば、いかに複雑でもその動作は基本的に理解可能だ。では、人工物を創り出すヒトの知は理解できるだろうか?
これについては、古来、哲学をはじめとして心理学、社会学、認知科学が多くの示唆を与えてきたが、主観的な議論になりがちだった。一方、近年の脳科学、神経科学は、脳の動的な活動を視覚化するなど、従来にない方法で新しい議論を可能にしてはいるが、まだまだ未知の部分も多い。もとより完全などありえないこの問題に対しては、多様な理解が必要なのだろう。
そこに、登場したのが「構成的手法」である。知的な人工物の代表であるロボットを設計・製作し、動かすことでヒトの知に迫るというものだ。しかし、ロボットが限られた環境で動作できるように、設計者が必要な機能を明示的な行動として書き込むだけでは、ロボットはそれを再生するだけで、身体から引き出される多くの可能性が静的なプログラムに押し潰されてしまう(註1)。環境に適応するための「知能」は、設計者側にあり、ロボットが獲得するものではないからである。
ヒトの生涯を決定しているのは、遺伝因子だけでも環境因子だけでもなく、両者の複雑な相互作用であることは今や当然とされている。しかし意外にも、ロボットの設計にこの考えを当てはめ、内部構造と外部環境の両者の設計を重要視する見方は少なかった。多様で動的な環境を含めて考える、というよりも、これこそが知の発生に不可欠という認識の上で、環境との相互作用を中心とした設計論が必要となるのは当然なに、それが行われて来なかった。
環境因子には人や他のロボットが含まれ、これこそ多様な動的環境そのものである。構成的手法は、こうした環境を設定でき、コミュニケーション(複数の脳の相互作用)と知能の関係や、コミュニケーションにおける認知機能の発達を明らかにするのに有効な方法と言える。こうして、単一の脳を対象とする研究から、コミュニケーションや社会性など環境との相互作用を含めた研究へと進めるという方法を試みている。
(註1)「身体から引き出される多くの可能性が静的なプログラムに押し潰されてしまう」とは?
ヒトもヒューマノイドも、それぞれ独自の身体をもっている。同じ脚であっても、長さや関節の位置、重さなどはまちまちである。それぞれの身体には、それぞれに相応しい運動パターンがあるはずで、多様な環境下での運動は、身体の違いに応じた多様性を見せるだろう。しかし、あらゆる環境を想定して設計者がすべてをプログラムすることは不可能である。無限にある環境に対応するためには、出会った環境で実際に身体を動かし、環境との相互作用の中から最適な運動パターンを各自で見いだしていく必要があるが、設計者がプログラムを一方的に与えてしまうと、こうした可能性は最初から生まれないのである。
コミュニケーションと知能の関係の研究
私は、このような研究の試験台としてロボットによるサッカーゲーム、ロボカップを提唱した(1)。サッカーロボットの場合パッサーとシューターが相互学習し、行動を協調していく。ここでは、お互いの行動と観察がメッセージのやりとりとなり、予め決められた形ではないコミュニケーションが働いている。こうして、これまでに車輪移動型ロボットを用いた強化学習(註2)によるスキル獲得、協調行動の実現、進化的手法による協調行動の発現、教示と学習による意思決定などの課題を扱ってきた(2)。2002年の世界大会から開催されたヒューマノイドリーグでは、サッカーに限らず、ヒューマノイド(註3)研究一般の試験台としての利用が考えられた(写真1には第一回大会に出場した阪大チームのヒューマノイド(富士通HOAP-1ベース) を示す。)。
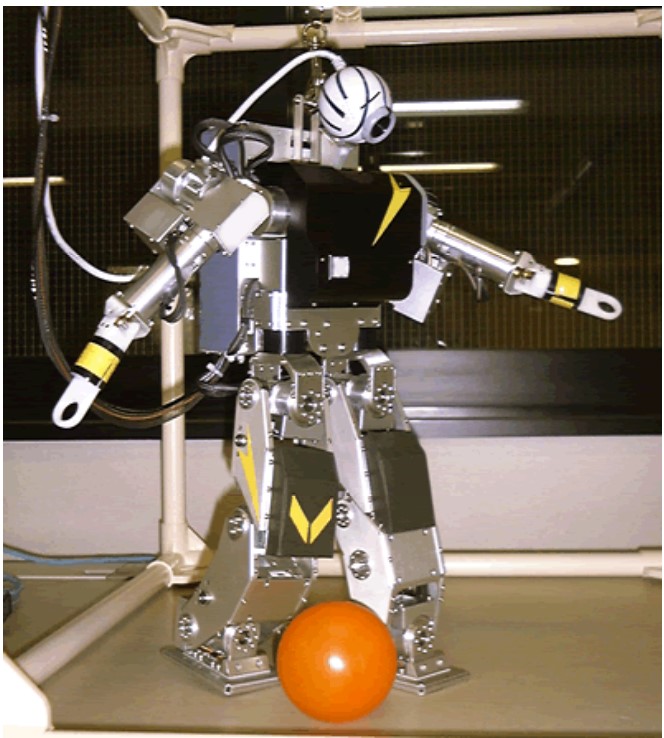
(写真1)阪大ヒューマノイド(富士通HOAP-1ベース)
(註2)強化学習(Reinforcement Learning)
強化学習とは,試行錯誤を通じて未知の環境に適応する学習制御の枠組である。通常の教師付き学習(Supervised learning)では、学習システムの外部に教師が存在し、理想的な出力の例を示していくが、環境が多様である場合はこうした例を示すこと自体が困難となる。強化学習では、こうした教師は存在せず、報酬を手がかりに学習が進んでいく。環境との相互作用を通じて、利得(報酬の総計など) を最大化できるような最適なあるいは合理的な行動パターンを獲得していくことになる。
(註3)ヒューマノイド
人の形や機能を真似たロボットをヒューマノイドと言う。視覚などの感覚情報を基になされる状況判断、歩行などの運動の制御、状況判断を基にした適切な運動パターンの選択が、こうしたロボットの基本となる。ヒューマノイド・サイエンスは、さまざまな技術の結集が必要となる分野なのである。
コミュニケーションにおける認知機能の発達の研究
新しい研究として具体的には、(1) 相互感覚地図学習による身体図式獲得、(2) 共同注意の発達的学習がある。
(1) 相互感覚地図学習による身体図式獲得
様々な行動を実現するためにまず必要なのは、自身の身体表現である。つまり、自身の身体と外界との関係を把握しておくことである。この過程を解明するための第一ステップとして、ロボットが身体表面の図式を獲得していく機構を研究している。 一組のステレオカメラと体表面(両腕と手先) の触覚センサー、さらに姿勢センサーをもつロボット(写真2)がある。これがさまざまな運動を試み、たまたま何かに触れたときに、2つ以上のセンサーからの入力を同時に受けているユニットがあれば、それが増強されるようになっている。このような学習過程を経て、異なるセンサー間の相互参照が可能になり、身体表現が獲得されていくのだ。 異なるモダリティがつくる空間が、相互に相補的に身体表面を表現していく過程は、心理生理的な現象のモデルとなると考えてよかろう。
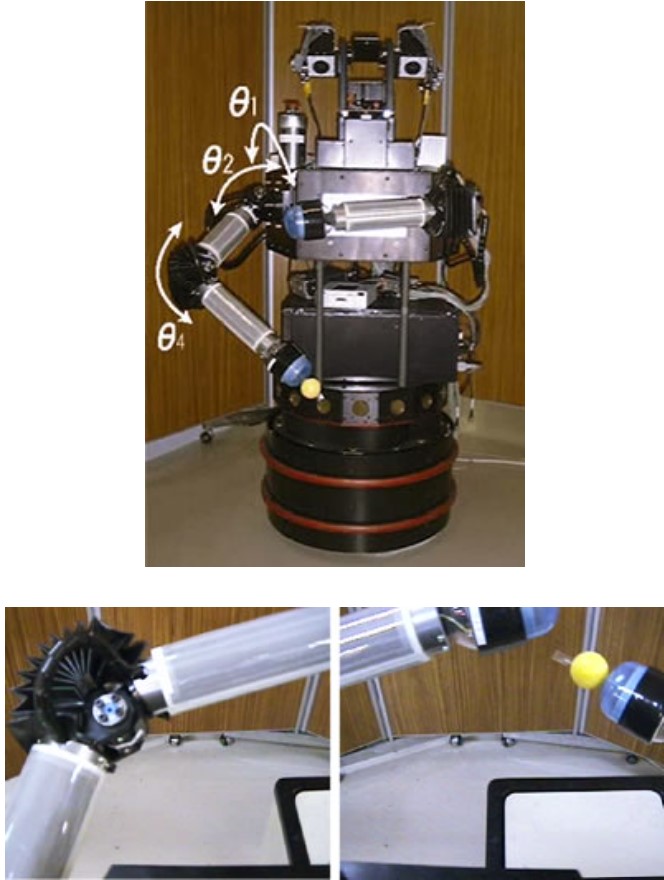
(写真2)身体図式獲得実験に用いたロボット(上)から眺めた自身の腕画像(下:ステレオ)
(2) 共同注意の発達的学習
発達認知科学の分野では、子供の最初の言語学習は、その子の注意や記憶能力の発達と、それに対応した養育者の助けとで進むとされている。学習者の内部機構の発達と環境からの学習促進とが必要というわけだ。この基本となるのは、同じものに一緒に注意を向けること─共同注意─である。共同注意は、コミュニケーションの始まりであり、言語理解や読心などの社会的能力の獲得に関連している。
一方、工学でもロボットとヒトとのコミュニケーション実現への試みがなされてきたが、応用を目的にしているために、発達認知科学での知見は活用してこなかった。そこで、我々は、学習者(ロボット)と養育者(ヒトあるいはロボット)の双方が発達機構をもつ場合の共同注意の発達に注目し、研究を進めている(写真3)。
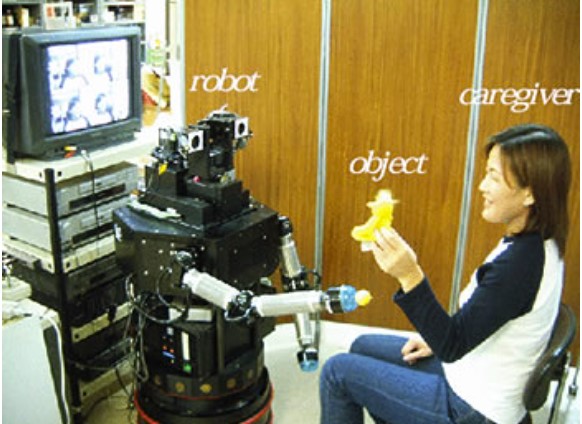
(写真3)共同注意の実験の様子
この分野は、最近急速に発展してはいるが、まだ緒についたばかりでもあり、今後は、異分野の研究者が参集し、構成的手法について考え合うなどの協力が必要となるだろう。ロボティクス、人工知能、脳科学、神経科学、生理学、認知科学、心理学、動物行動学、進化人類学、社会学、言語学、複雑系科学。これらの研究が人工物を核として融合するのがヒューマノイド・サイエンスであり、ロボットという日本の得意分野を活かせば、科学技術だけでなく、人間を知るということでも世界貢献ができると確信している。
参考文献
(1) 松原 仁, 浅田 稔, 北野宏明. ロボカップの歴史と2002年への展望. 日本ロボット学会誌, Vol.20, No.1, pp.2-6, 2002.
(2) 浅田稔 編著,「RoboCupSoccer: ロボットの行動学習・発達・進化」,共立出版,2002.

浅田稔(あさだ・みのる)
浅田稔氏 写真 1953年滋賀県生まれ。1977年大阪大学基礎工学部制御工学科を卒業し、同大学院修士・博士課程、基礎工学部学助手、工学部講師、助教授を経て1995年より大阪大学教授。工学博士。著書に「身近になるロボット」や「ロボカップ:ロボットの行動学習・発達・進化」などがある。
.jpg)

.jpg)
.jpg)