RESEARCH
ロボットで探る
母鶏とヒナのコミュニケーション
近年、動物福祉の考え方の急速な発展に伴い、動物の先天的な行動を理解することが重要視されている。私たちはニワトリの行動をもとに動物を理解し、動物の状態をより良くすることを目指した。親と子を繋ぐ、ニワトリの巧みな関係性を見てみよう。
1.動物行動学からみるニワトリの社会性
生きものは生きものを食べ物として、他の生きものの「生命」をいただいて生きている。人間は農業、畜産により、生きものを食べ物として育てることで数を増やし、発展を遂げた。とはいえ人間が特別ではなく、地球上の生命は同じ時間をかけて進化した等しい存在である。日頃、鶏肉や卵として口にするニワトリも同じである。従来、養鶏では鳥の自由を制限したケージでの飼育が行われてきたが、近年「アニマルウェルフェア(動物福祉)」の考えが広まり、動物の生活の質を高める飼育が模索されている。そのためには、ニワトリという生きものを理解し、本来のニワトリ行動に学ぶことが大切だとわかってきた。ニワトリが、生きものらしく生きられる環境で暮らせるしくみをつくるために、ここでは母鶏とヒナの関係に注目した。
ニワトリの祖先種である野生の赤色野鶏は、オス1羽とメス数羽のハーレムを形成する。各ハーレムは縄張りを形成し、「コケコッコー」という発声により縄張りを主張し合い、厳格な社会的順位を示すといった、多様な社会行動が見られる。飼育下のニワトリでも同様の行動が見られ、オスの場合、嘴などでとさかをつつき合う総当たり戦の闘争を経て順位を決める(つつきの順位)。上位になったニワトリは、餌や繁殖において優先権をもち、下位のニワトリが上位を攻撃することはないので全体の攻撃行動が少なくなる。ニワトリが鳴き声をあげる時間は体内時計で決まっているが、最上位のオスから順に鳴き始め、下位のニワトリは時間がきても順番がくるまで待っていることがわかっている。採卵鶏の飼育を窮屈なバタリーケージから、砂浴び場や巣箱を備えたエンリッチドケージにすると、メスでも社会的順位づけがおきる。上位のニワトリが砂浴び場を優先して利用し、下位のニワトリは巣箱を避難場所にすることが報告されている。
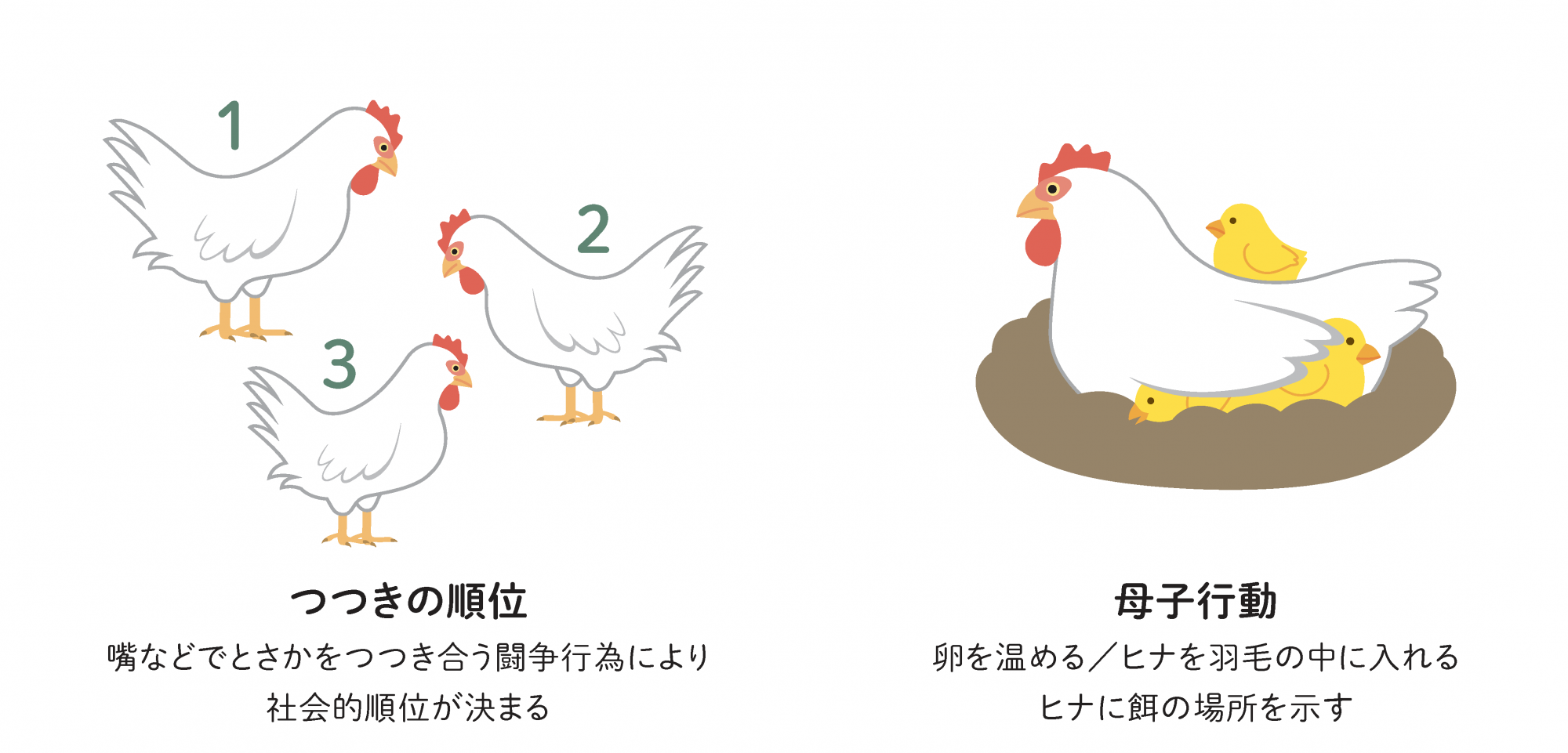
(図1)ニワトリの順位制と母子行動
家畜化された犬や猫、鳥類や哺乳類のほとんどにも順位付けがあるように、ニワトリも順位制や母子行動といった社会的な行動が見られる。
このような生きもの本来の姿が望ましいという考えから、飼育の現場では自由に行動ができる平飼いへの移行が進められている。その一方で、社会性は自然の中で鍛えられた本能であり、数多くのニワトリを飼育する環境では、餌の競争により生育が偏ることや、攻撃が過剰になり共食いに発展することもある。このような栄養不足や死亡リスクは、ニワトリにとっても人間にとっても不幸であり、深刻な問題となっている。そこで我々は、ニワトリの行動の分析を通して、ニワトリをよく知り飼育に活かす技術を目指している。
2.母鶏とヒナの関係をロボットで再現する
ニワトリの子育てでは、母鶏がfood-call(フードコール)と呼ばれる「コッコッ」という鳴き声をだし、餌の場所を突いて示すことでヒナに餌を食べさせる。この育雛行動は、ヒナの体温調節機能が発達する4週間ほどまで継続し、母鶏に育てられたヒナは、行動が発達し栄養状態がよく、人にもなつきやすいことが知られている。また、この性格は母鶏と離れても続き、飼育下でも餌をよく食べ、共食いがおきにくい。母鶏による保育は効果的であるが、集団飼育下で母鶏と一緒にすることは難しい。そこで、この習性とニワトリなどの鳥類のヒナが、出生後の間もない時期に最初に見た動くものを追従する「刷り込み」の能力があることに注目し、母鶏役の代用としてロボットの利用を考えた。

まず、ニワトリの剥製にモーターを組み込み、餌場を教える「剥製ロボット」を作製し、スピーカーによるfood-callに併せて、ヒナ5羽に2週間示した。その後、餌をつつき始める摂食開始までの時間を測定し、恐怖反応性について調べた。恐怖反応性の実験は、人の手や新奇物に触れるまでの時間(潜伏時間)を測定し、短いほど恐怖反応性が低いと評価する。剥製ロボットを入れた提示区はヒナだけの対照区に比べ、摂食開始までの時間が有意に短縮され、恐怖反応も低い傾向を示した。さらに実用を見据えて、剥製の代わりに母鶏に見立てた棒が上下するだけの簡易ロボットを開発した。すると、この簡易ロボットでも剥製ロボットと同様の効果が見られた。「刷り込み」の効果によって、ニワトリらしさとは無関係に、初めて目にした簡易ロボットを母親だと認識した。
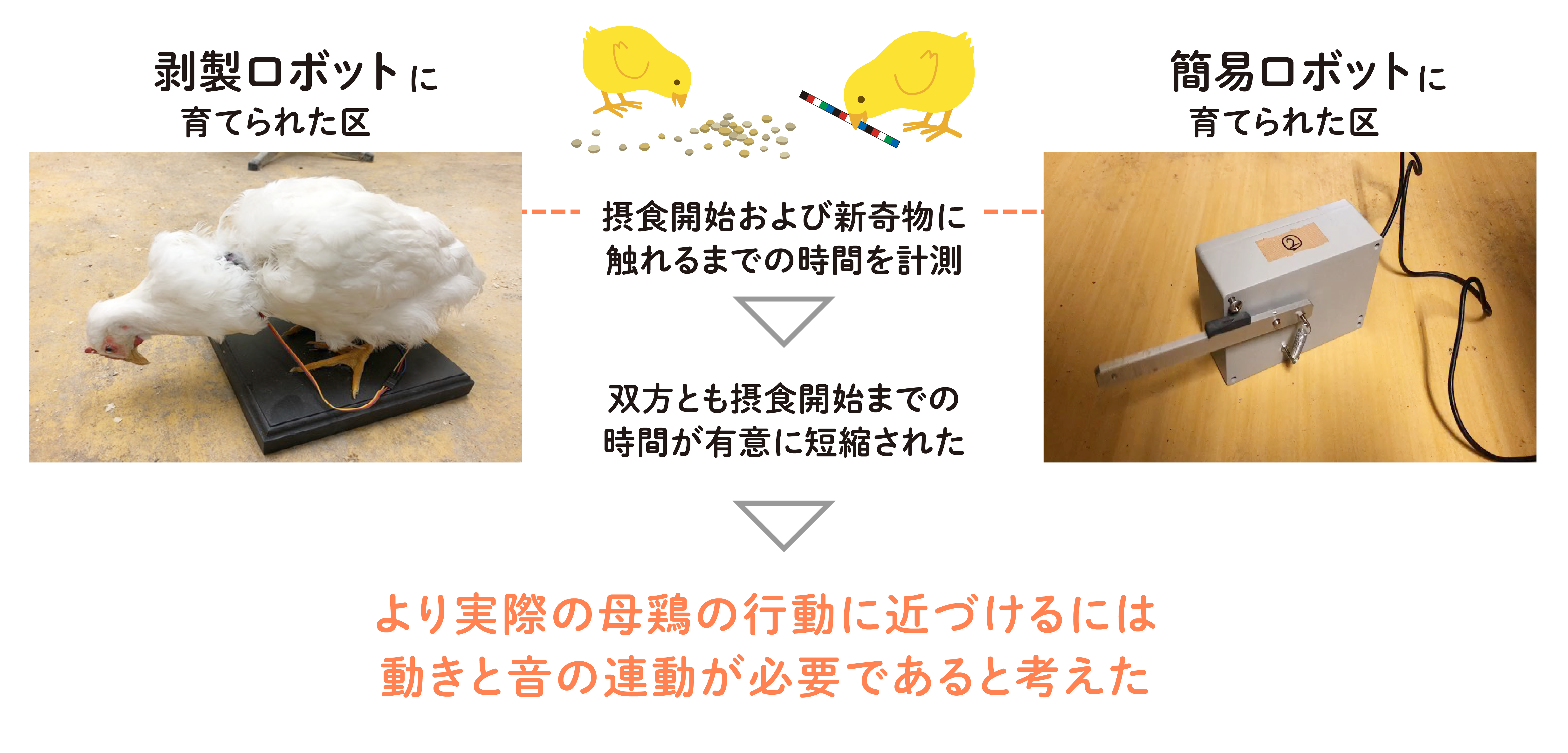
(図2)2種類の母鶏模倣ロボットの共通点
実際の母鶏に似せた剥製ロボットに育てられたヒナと、極めて簡易化したロボットでもヒナの摂食時間の効果が変わらないことから、簡易ロボットでも剥製ロボットの代替となり得る可能性が示唆された。
これらのことから簡易化したロボットでも剝製ロボットの代替となり得る可能性が示唆された。しかし、摂食開始までの潜伏時間に差が出ていないことから、更なる改良が必要であると考えた。そこで、私たちは動きと音が独立している点が実際の母鶏の行動と異なるということに注目した。先ほどの簡易ロボットに餌場を示す際に母鶏がつつく音を加え、「対照区」「ロボットのみ」「音のみ」「ロボットと音」4つの区域で、それぞれのヒナの摂食時間および新奇物に触れるまでの時間を計測した。
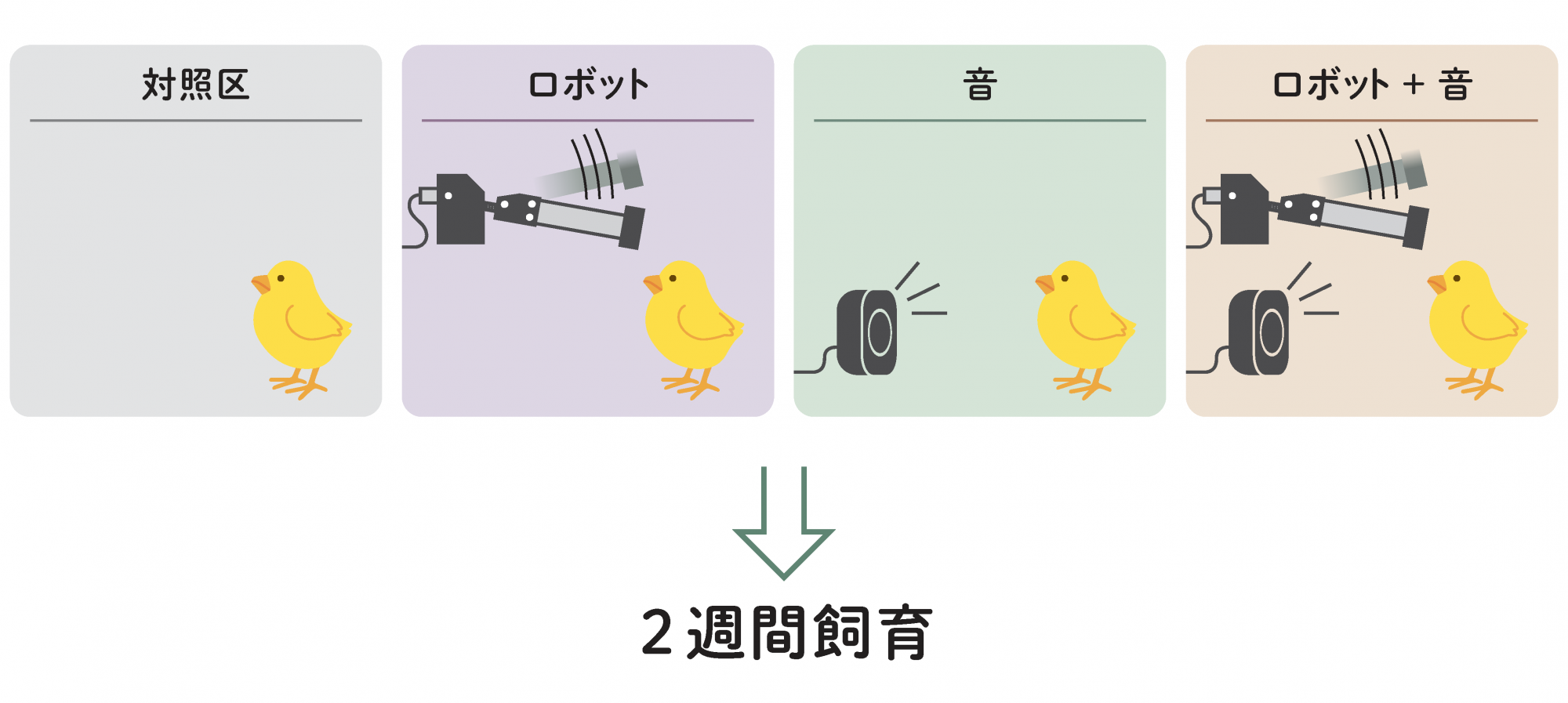
(図3)ロボットを用いた雛の行動の制御を4つの区に分けた実験
孵化直後のヒナ5匹を、それぞれ「ヒナのみの対照区」「ロボットのみ」「food-callの音のみ」「ロボットとfood-call」の4つの区に分けて飼育した。
すると、母鶏を模倣した動きと音を連動することで、ヒナの摂食開始までの時間および新奇物に触れるまでの時間がより短くなることがわかった。
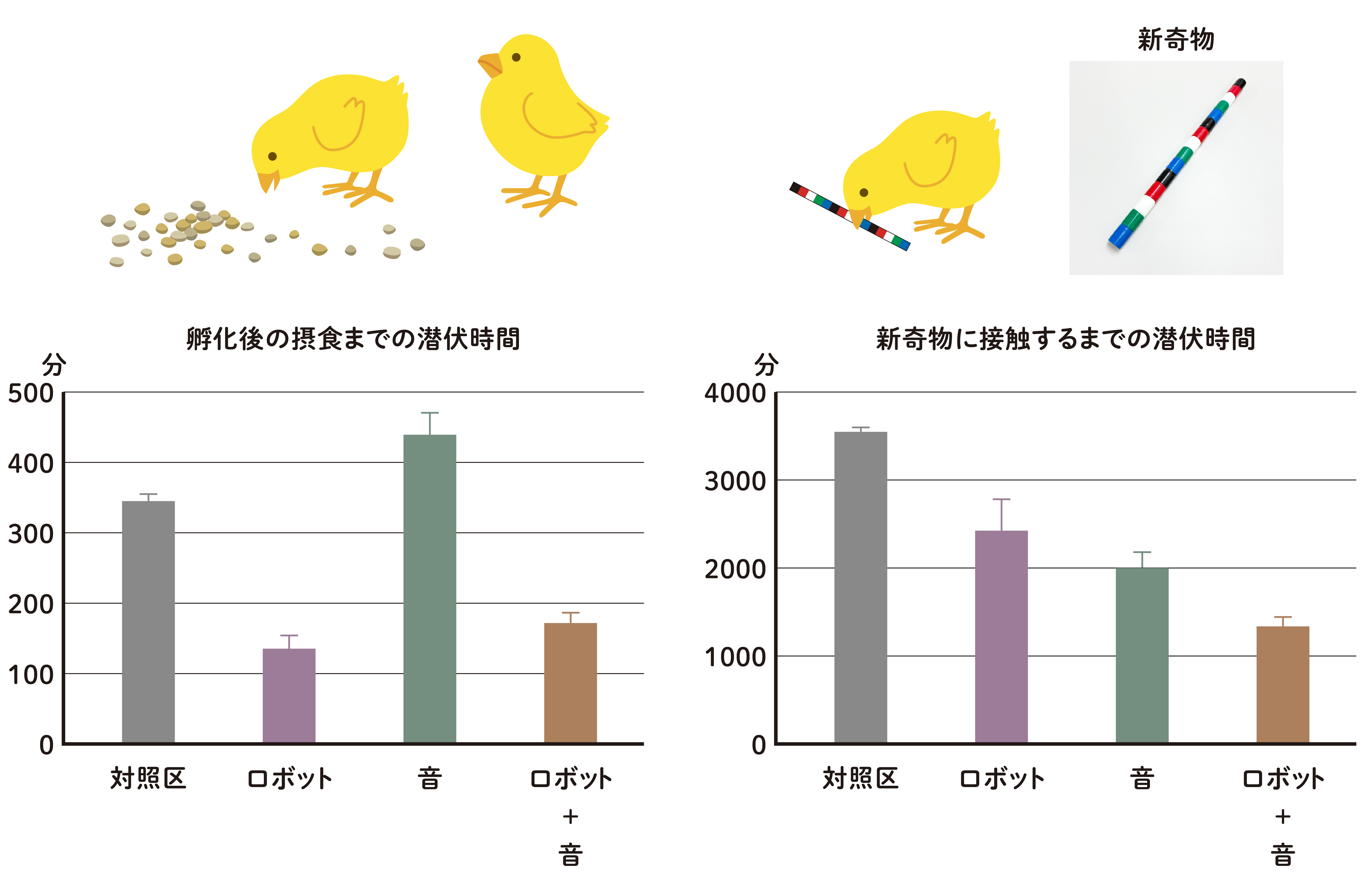
(図4)生育区ごとの摂食および新奇物に接触するまでの潜伏時間の結果
それぞれの区で育てられたヒナの接触および新奇物に接触するまでの時間(潜伏時間)を計測した。
つまり、簡易なロボットであっても母鶏の動きを模倣した動きと音を連動し、母鶏の行動を再現することでヒナを健康に育てる効果があり、ロボットの活用がヒナの生活の質を向上させることにつながるということがわかった。
3.母鶏とヒナのコミュニケーションのしくみ
母鶏の存在はヒナの発育によい影響があることはわかっていたが、food-callがどのようにヒナに作用するかはわかっていなかった。そこで、まず母子間での音声コミュニケーションの解析を試みた。
産卵し抱卵中の母鶏1羽に生まれたてのヒナ1羽との母子行動を誘導し、音声データを得た。この音声データから2,038個の波形を抽出して分類し、時系列解析である推移行列解析を行った。すると、ヒナの音声には明らかに異なる2種類のパターンが見つかった。この差異はヒナが母鶏と一緒にいる時と、母から引き離された時の違いに由来するものであり、前者を「喜びのピヨ」、後者を「悲しみのピヨ」と呼ぶことにした。この2種類の鳴き方と母鶏のfood-callの時系列による関係を調べると、ヒナが悲しみのピヨを発した時に母鶏は「コッコッ」とfood-callで応え、その声を聞いたヒナは喜びのピヨで返していたのだ。つまり、母鶏のfood-callが、ヒナの状態を悲しみから喜びに変えるということだ。
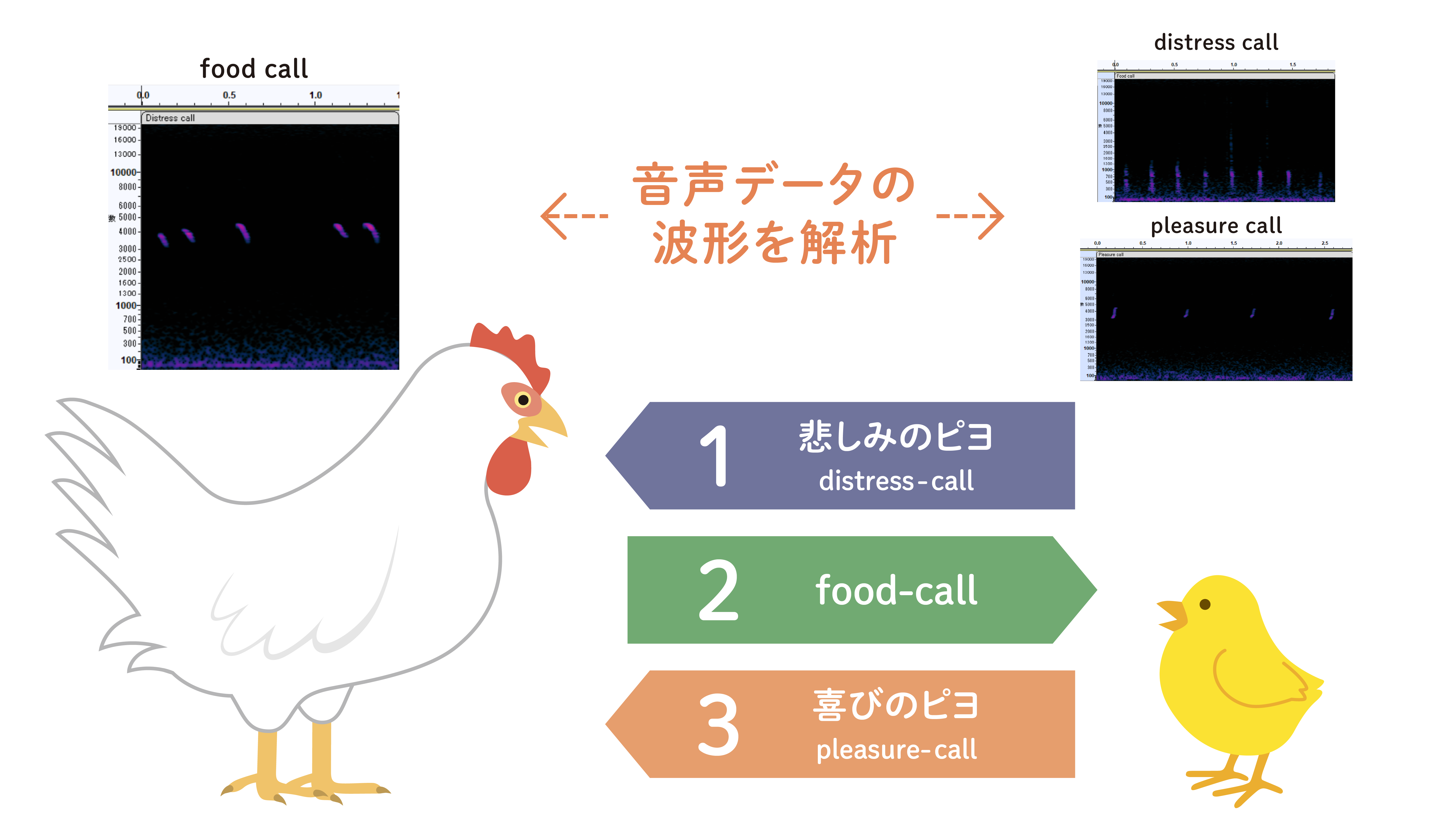
(図5)鳴き声を介したニワトリ親子の相互的コミュニケーション
孵化直後の母子間の音声コミュニケーションを解析したところ、ヒナは異なる2種類の鳴き声のパターンを使い分けていた。
この音声コミュニケーションがヒナの生育に与える影響を調べるため、母鶏の人工の音声を聴かせる実験を組み立てた。food-callを全く聴かせない(対照区)、food-callを脈絡なく聴かせる(YC区)、悲しみのピヨを発した時にfood-callを聴かせる(提示区)、これら3つの条件で、5羽ずつ4回の実験を8日間行った。ヒナの「喜びのピヨ」と「悲しみのピヨ」は周波数の形から区別し、母鶏のfood-callを再生する「Chick Call Detector(CCD)」という専用のソフトウェアを開発し、オーディオインターフェースを介して音声がスピーカーから流れる仕組みを構築した。
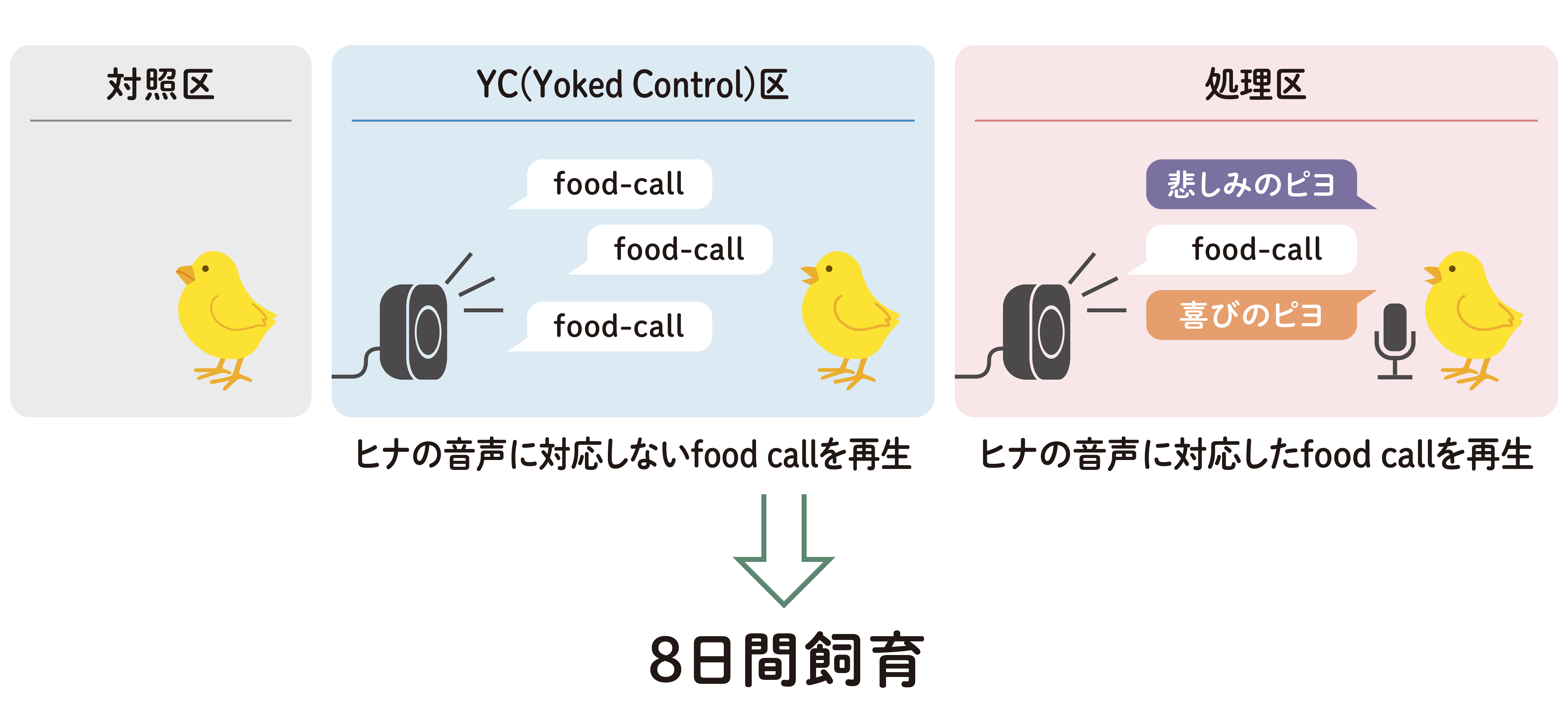
(図6)母鶏とヒナの母子間コミュニケーションを再現する実験
孵化直後のヒナ、それぞれ「ヒナのみの対照区」「ヒナの音声に対応しないYC区」「ヒナの悲しみのピヨに対応した処理区」の3つの区に分けて飼育した。
実験後、それぞれの条件のヒナについて、摂食開始の時間と恐怖反応性を評価した。結果は、母鶏とのコミュニケーションを真似た提示区が人や新奇物への接触、摂食開始のいずれの時間も他の条件に比べ有意に時間が短くなった。また、ランダムに聞かせる条件では対照区との中間を示し、悲しみのピヨに対して応答するというタイミングも重要であることがわかった。
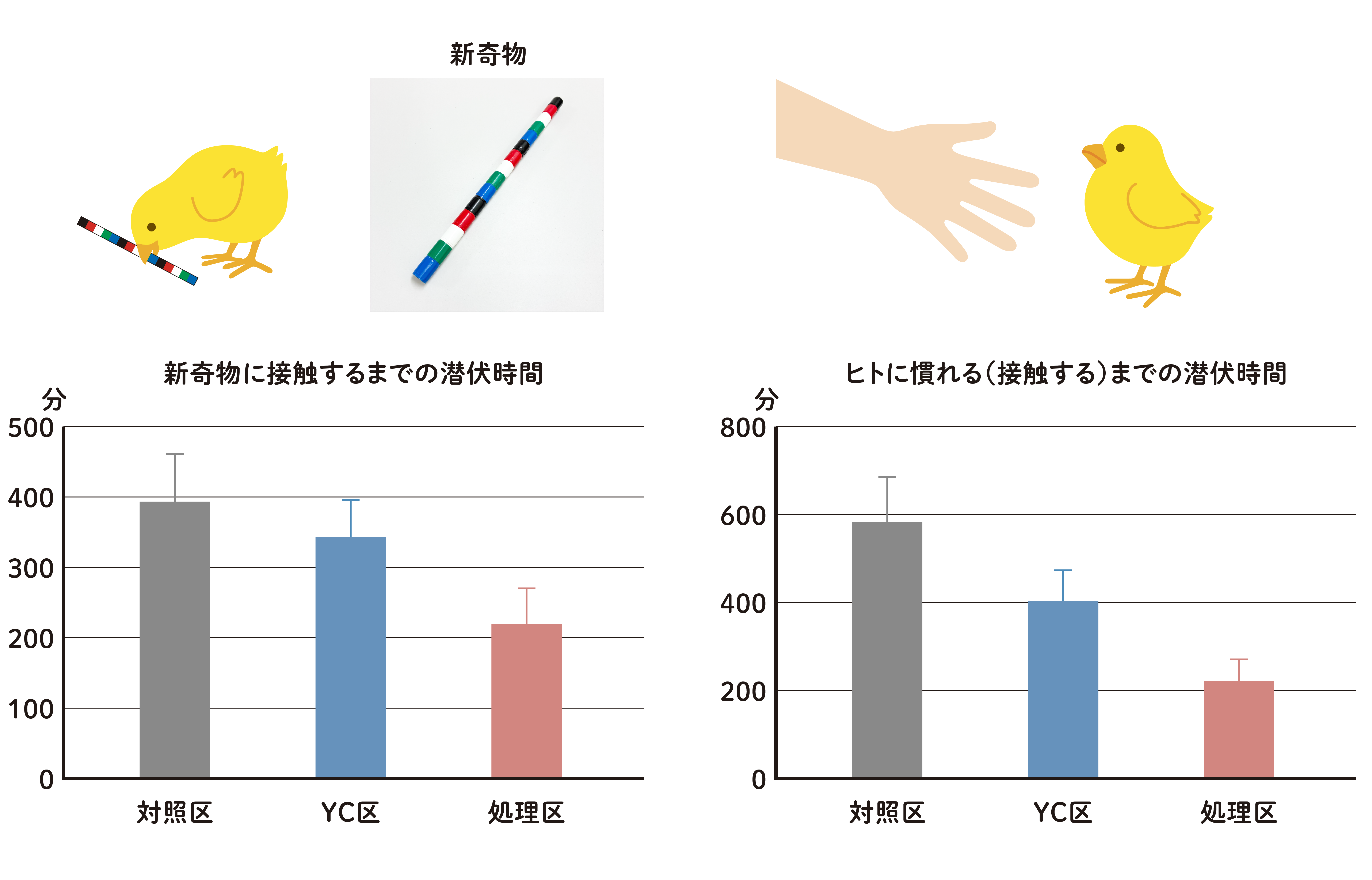
(図7) ヒト慣れ・新奇物テストおよび接触・摂食までの潜伏時間の結果
これらの結果から、録音した母鶏のfood-callの再生によってもヒナの人や新奇物に対する恐怖反応性を低下できることが明らかとなった。また、脈絡のないランダムなfood-callの提示よりも、母子間の音声コミュニケーションがヒナの健康に寄与することもわかった。本研究において構築した音声によるアニマルコンピュータインタラクションの基盤技術が、良好な飼育環境の構築に有効であることが期待される。
4.動物への配慮に基づいた研究の広がり
私たちの取り組む動物への配慮に関する考え方は、「動物の権利」「動物福祉(アニマルウェルフェア)」「動物愛護」の3つに大別される。これらは共通して動物への配慮を基盤とするが、その核心において異なる視点を持つ。
「動物の権利」思想が動物の利用を一切認めないのに対し、「アニマルウェルフェア」は、肉や卵の摂取、ペット飼育といった動物の利用自体は許容する。しかしながら、その利用過程において、虐待や劣悪な環境下での管理を否定し、動物の一生を通じた状態の向上を基本的な考え方とする。これは、動物を殺すことを止めるといった極端な主張ではなく、利用するならばその状態を最大限に良くすべきという、現実的な視点に立脚している。
一方、西洋で生まれた「動物の権利」や「アニマルウェルフェア」に対し、日本には独自の「動物愛護」という考え方がある。動物愛護は「人が主体」となって動物を配慮する点が特徴的である。例えば、ケージ飼いのニワトリを「かわいそう」と感じたり、食事前に「いただきます」と感謝したりする行為は、人が主語となる動物愛護的な発想といえる。こうした発想がアニマルウェルフェアへの関心を引き起こすことは確かである。しかし、単に「かわいそう」と感じるだけ、あるいは感謝するだけでは、動物の状態、すなわちアニマルウェルフェアそのものの向上には繋がらないという事実も認識すべきである。
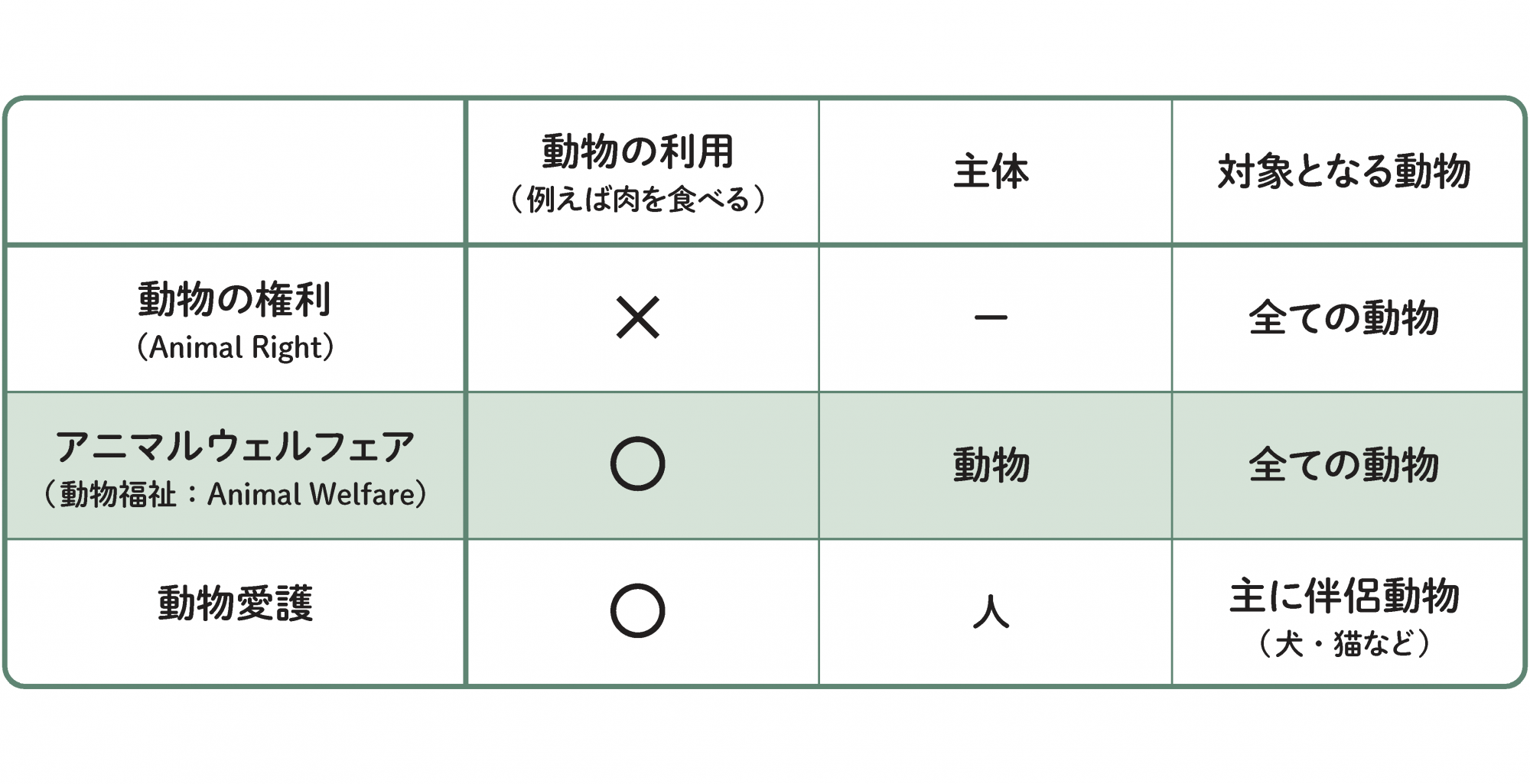
(図8)動物の権利、アニマルウェルフェア(動物福祉)、動物愛護の違い
まとめると、アニマルウェルフェアの考えとは、人間が動物を利用したり屠殺して食べたりするのをやめるということではなく、また手を合わせて「いただきます」と感謝することだけでもなく、そのような動物の利用を許容しながらも、動物の一生を通じて、動物の状態をより良くするということである。
今後さらに母鶏とヒナの母子間コミュニケーションの詳細を明らかにし、動物の状態を「把握」する技術と、ロボットをつかって「操る」技術を連動させることで、動物との会話を実現するアニマルコンピュータインタラクション技術の構築を目指していきたい。
動物福祉モデル鶏舎Unshelledの試み
2025年、東京農工大学農学部(府中キャンパス)に動物福祉モデル鶏舎「Unshelled(アンシェルド)」が新設された。鶏舎の名前であるUnshelled(アンシェルド)とは、“覆われていない”という意味を持つ言葉である。開放的な空間で飼育されているニワトリが観察できる透明性の高い鶏舎で、また、既存の枠組みにとらわれない“殻を突き破る”革新的な研究とイノベーションを生み出そうという思いが込められている。
この鶏舎は、着替えることなく入室できる見学室が中央にあり、中央から放射状に3つのニワトリが飼育されている部屋が設置されている。3つの部屋には、ケージやケージフリー(放し飼い)など計4つの飼育システムが導入されており、見学室から窓越しにそれぞれの飼育のようすを見ることができる世界初の鶏舎である。
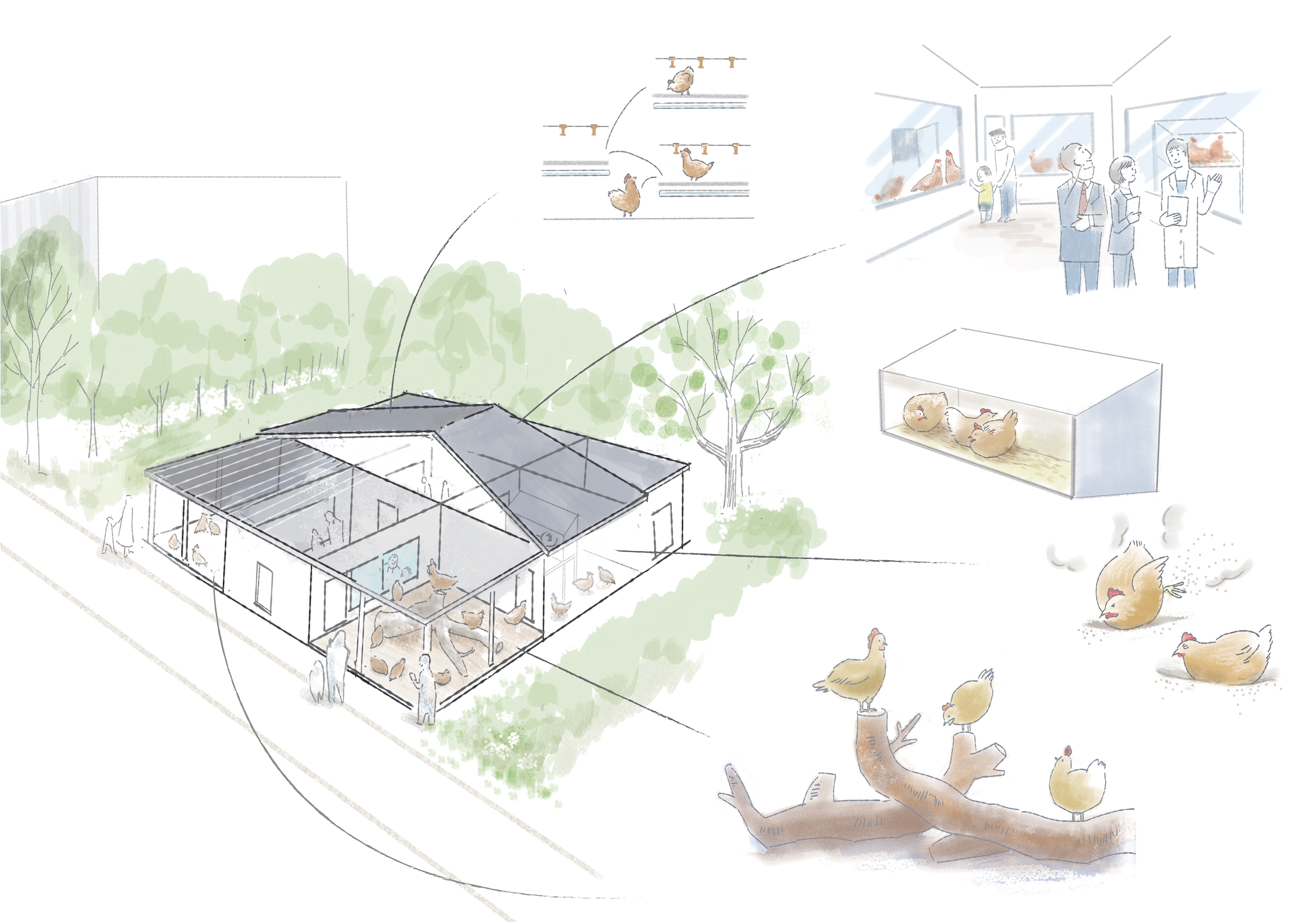
この鶏舎は、アニマルウェルフェアの研究と教育普及という2つの目的を持っている。研究については、この多様な飼育システムの比較研究により革新的な循環型システムの創造を行うことを目的とし、Animal Computer Interactionを用いたヒナの育雛の研究などを進めている。その他にも、放し飼いではニワトリの代謝や腸内細菌等が変化し、それらの代謝物が血液を介して卵黄に移行することで、卵のうま味や栄養価が高くなることを明らかにしており、それを食べる人もまた健康になることができるOne Welfare(動物と人と地球の健康を一体的に捉える考え)を実現しようとする研究を展開している。
教育普及については、多様なステークホルダーが集って議論するための共感の場を提供することを目的とし、ケージやケージフリーのニワトリの行動を肌で感じつつ、生産性・経済性といった情報を共有し、フェアな議論を基に、日本で目指すべき方向性を対話の中で協調的に捉えることを目指している。

(画像)動物福祉モデル鶏舎Unshelledのケージフリー(放し飼い)環境で育つニワトリたち

新村 毅(しんむら・つよし)
麻布大学獣医学部卒業、同大学院獣医学研究科博士後期課程早期修了。学振PD/名古屋大学大学院生命農学研究科を経て、2013年、基礎生物学研究所特任助教、2016年より東京農工大学農学部生物生産学科准教授。2021年より・同大学教授。
.jpg)

.jpg)
.jpg)